Legs as Deformable Manipulators
[ongoing]
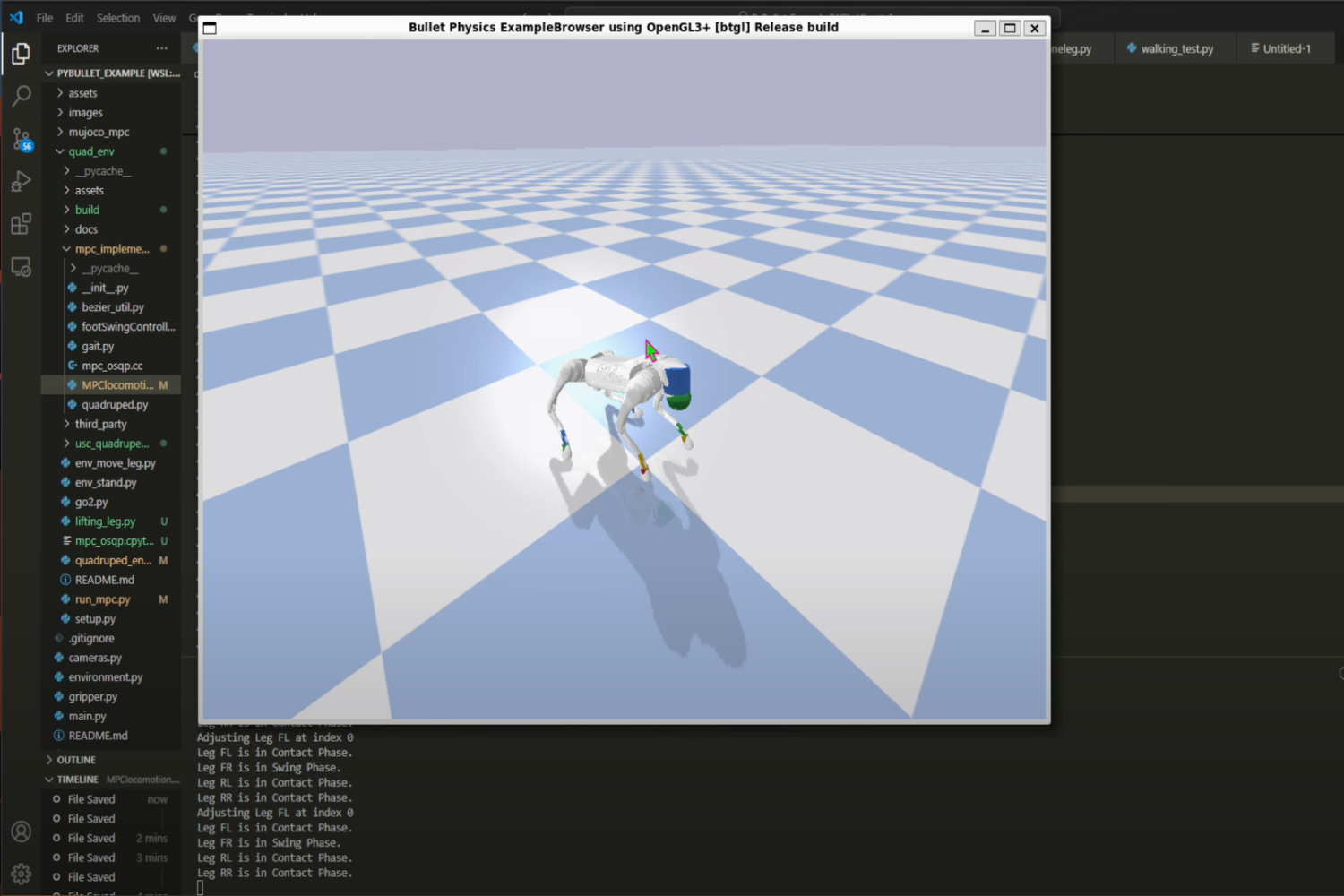
The first phase of the project was finding a suitable enviornemnt to train the robot. This was a time consuming task, as we needed to find an MPC (model predictive control) which would allow us to utilize a tripod stance freeing up one of the legs for manipulation. After several months of iterations, we settled on an MPC which runs in pybullet. The MPC was built for a different robot, which tasked us with tuning the MPC to our liking, so we could properly control the Go2. The MPC is complex, but using llms, I can quickly understand the code at a high level, and make changes without getting stuck on the nitty gritty cs work.
Next Steps
- Initial Training: Use supervised learning to train the Go2 to move a rope. The first simple goal is to train the Go2 to walk to the rope, and then systematically push it to a new location.
- Advanced Tasks: More complex operations, like untangling a rope or folding clothes.
What I've learned (so far)
- Environment Setup: Setting up environemnts for robotics is a timely proccess. I have spent a long time in the terminal!
- Adaptability: How to dynamically adapt to unfamilar enviornments
- Control Theory: MPC fundamentals and implementation in robotics environments
- System Optimization: control system tuning and optimization for specific use cases